Maulik Bhatt
I am a Ph.D. student in the Department of Mechanical Engineering at UC Berkeley, advised by Prof. Negar Mehr. I am part of the ICON Lab. I started my Ph.D. at UIUC in the Coordinated Science Laboratory, and moved to UC Berkeley with my advisor in January 2024.
In Summer 2025, I interned at Amazon Robotics, where I worked on learning-based motion planning for Proteus, a fully autonomous warehouse robot.
Previously, I graduated from IIT Bombay with an interdisciplinary dual degree (B.Tech in Aerospace Engineering + M.Tech in Systems and Control Engineering). I received the Panasonic Scholarship, Undergraduate Research Award, and Technical Hostel's Commendation.
Research
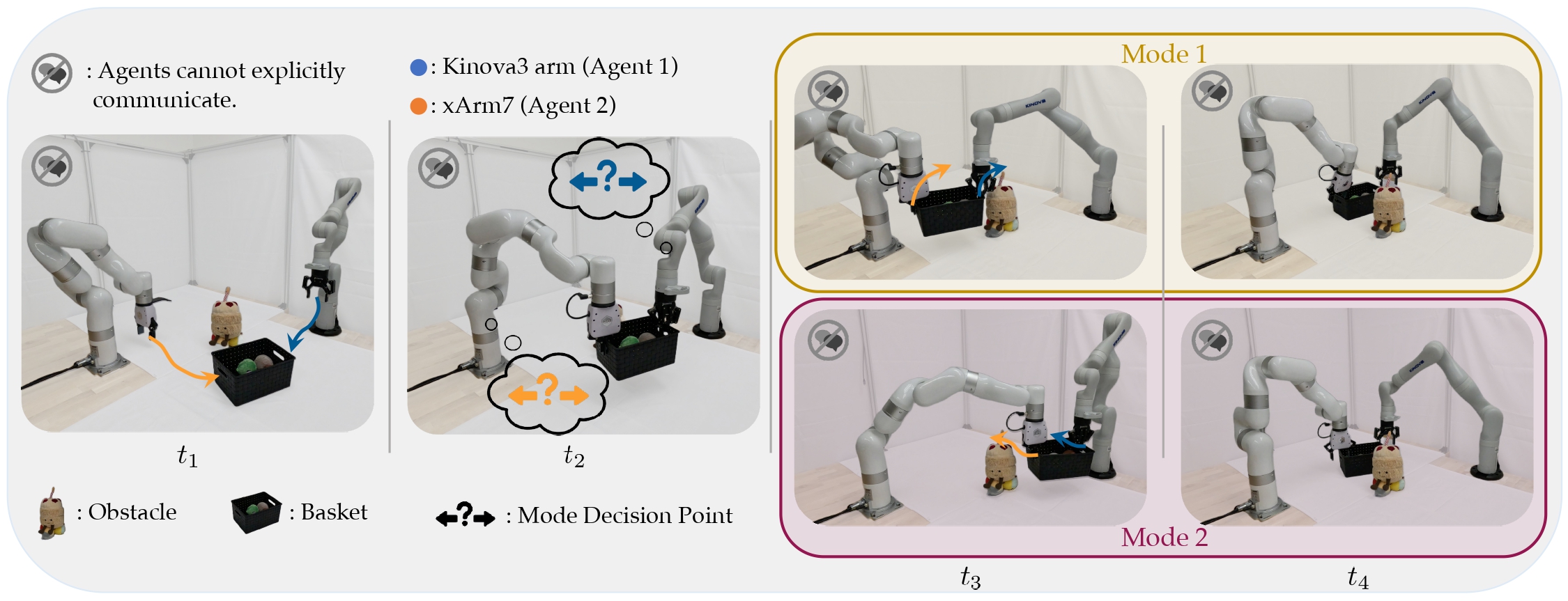
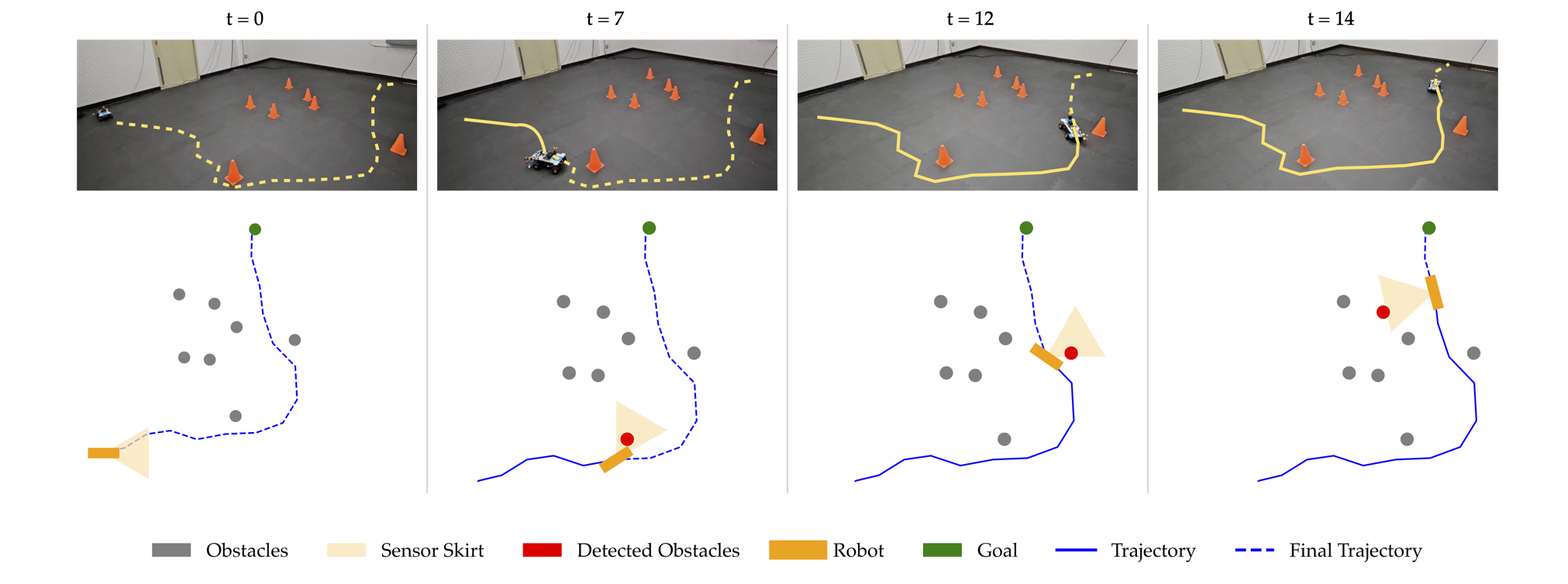
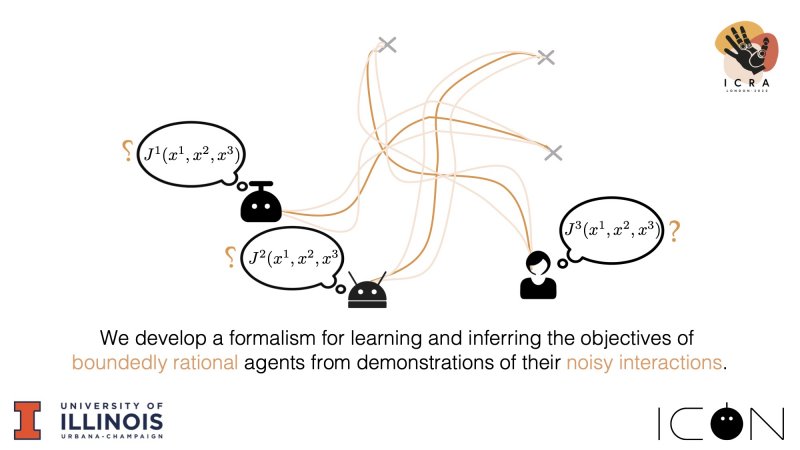
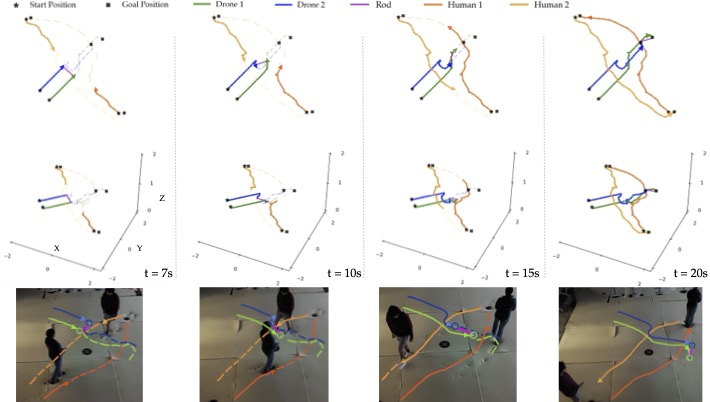
I am interested in developing autonomous robots that can work alongside humans and other robots. My research focuses on enabling agents to reason about other agents in the environment and effectively coordinate their motion. To this end, I have worked on approaches grounded in diffusion models and game theory, developing scalable algorithms that achieve real-time performance and robust multi-agent coordination.
Selected Publications
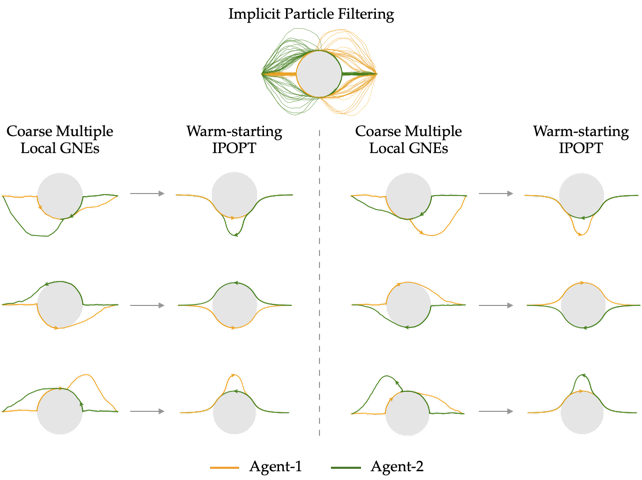
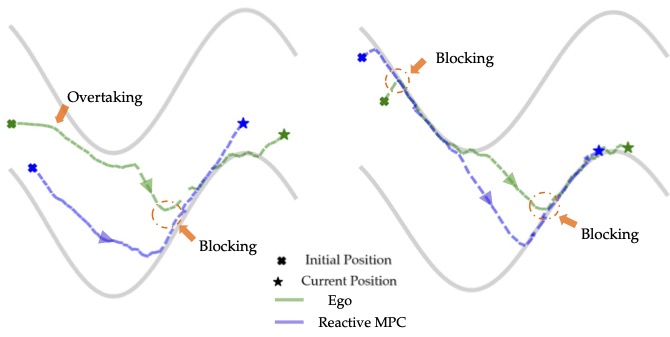
MultiNash-PF: A Particle Filtering Approach for Computing Multiple Local Generalized Nash Equilibria in Trajectory Games
IROS, 2025
Our method reduces multi-modal equilibrium computation time by up to 50%.
Earlier Publications
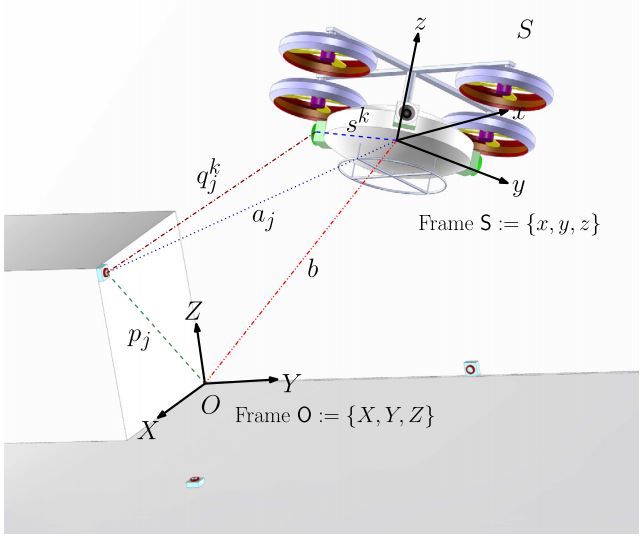
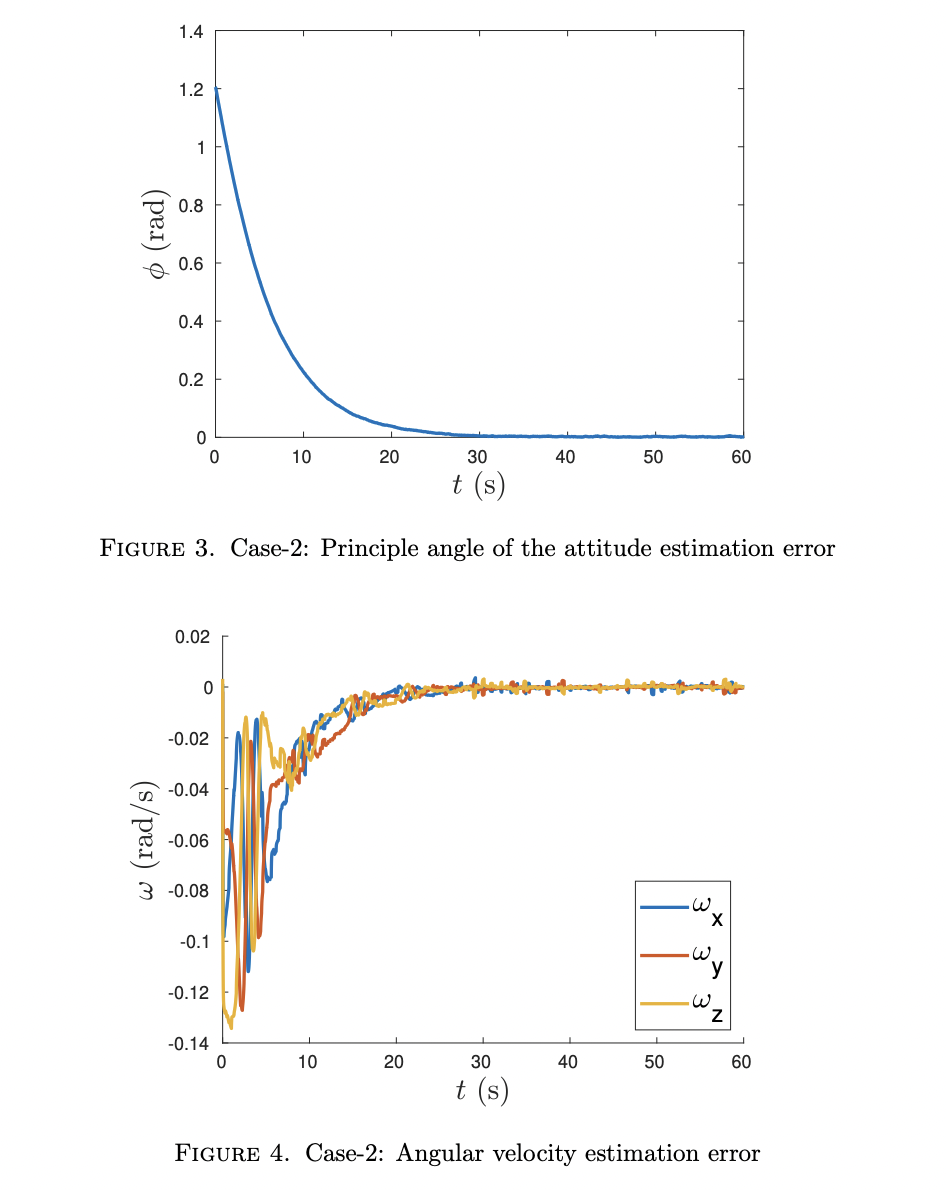
Discrete-time Rigid Body Pose Estimation based on Lagrange-d'Alembert Principle
Journal of Nonlinear Science
This is the first discrete-time pose estimator proven almost globally asymptotically stable.
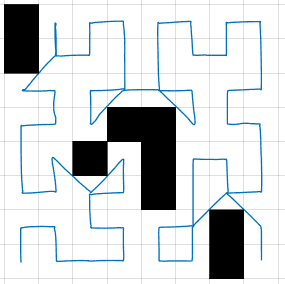
Modification of Hilbert's Space-Filling Curve to Avoid Obstacles: A Robotic Path-Planning Strategy
Indian Control Conference, 2019
Paper Experiment 1 Experiment 2
Developed an exploration algorithm for unknown environments with obstacle avoidance.
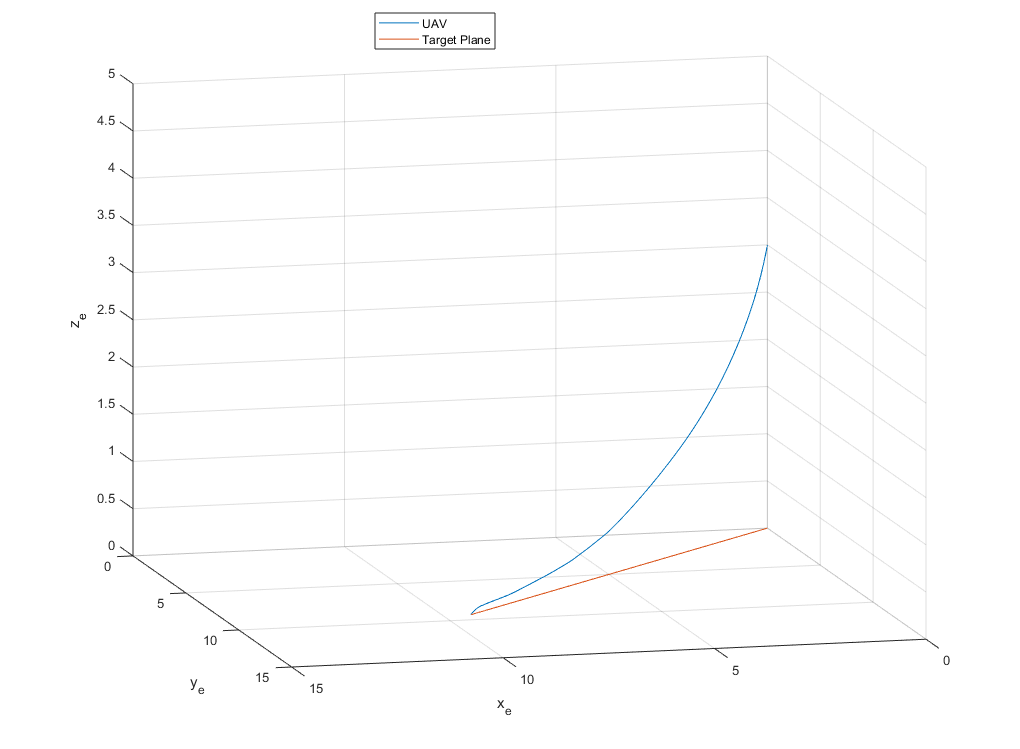
Autonomous Landing of Drones on Moving Ground Vehicles
Implemented a dynamic image-based visual servo control strategy for safe autonomous drone landing on moving ground vehicles.
Hobbies
Climbing, Hiking, Cooking, Flute